

儲罐除鏽爬壁機器人:打破附壁行走(zǒu)“次元壁”有多難?
時(shí)間(jiān):2024-12-23 16:22:00作者:LeeZhou來源:德(dé)高潔(jié)清潔設備
儲罐在生產運行過程中,罐體(tǐ)內外壁會受到外界環境中風水日曬、潮濕空氣侵蝕,從而導致儲罐外壁腐蝕現象的產生,隨著時間的推移,儲罐本(běn)體防腐層老(lǎo)化嚴重,破損脫落現象(xiàng)日(rì)益增加,加劇了罐體的大氣(qì)腐蝕,降低了儲罐的機械強度和安全性能,因此需要對儲罐表(biǎo)麵(miàn)進(jìn)行防腐除鏽再噴塗施工。
當前(qián)在儲(chǔ)罐防腐除鏽施工中,行業內逐漸采用爬(pá)壁機器人代替人工高(gāo)空作業,提高維護人員在危險環境下作業的安全性,降低作業風險,提高工作效率,並帶來顯著的經濟效益和社會效(xiào)益,儲罐除鏽防腐施工逐(zhú)漸進(jìn)入智能化、機械(xiè)化時代,儲罐除鏽爬壁(bì)機器(qì)人逐漸被行業內關注,但這並不意味著打破“次元壁”就(jiù)如此簡單。

由(yóu)於儲罐屬於(yú)大型靜置設備,儲罐表(biǎo)麵工作環(huán)境複雜,爬壁機器人需要搭載除鏽清(qīng)洗裝置,在儲罐表麵進行除鏽作業,應對與儲罐尺寸、形狀、表麵條件等問題,機器人需要兼具移動、行走、負載,越障(zhàng)等問題,因此(cǐ),爬壁機器人(rén)能否安全穩(wěn)定的完成高空作業,其吸附能力、行走能力是關鍵技術(shù)。
現有的(de)爬(pá)壁機器人由於吸附與行走耦合問題,存在機器人在罐體(tǐ)表麵向下滑動(dòng),穩定性低,不能承載足夠的載荷能力等弊端(duān)。因此,爬壁機器人若想實現人工向(xiàng)自動化機械施工轉變,必須打破爬壁機器人附壁行走(zǒu)的技術壁壘。
爬壁(bì)機器人的主要吸附方式包括:負壓吸附、真(zhēn)空吸附、磁吸附、氣體(tǐ)推力吸附、粘性吸附和仿生學吸附等,磁力吸附式適用於導磁性材料構成的壁麵,在保證吸附距離的前提下,能產(chǎn)生遠超(chāo)其它吸附方式的吸附力,且受到壁麵缺陷的影響較低,被廣泛應用在儲罐除鏽防腐(fǔ)領域。
磁吸附式爬壁機(jī)器人依磁力來源可分為電磁式和永磁式兩種:電磁式爬壁機器人吸力可調節(jiē),但是突然斷電或電力不足將(jiāng)造成(chéng)磁吸附力減小,進而可能引發機器人墜落事故;永磁式爬壁機器(qì)人的吸附力不受斷電影響,但吸附力大小受吸附距離影響且距(jù)離不易主動調節。目前,麵向大型儲罐的除鏽爬壁機器人,吸附方(fāng)式主要采用永磁吸附技術(shù)。
可采用永磁吸附+履帶式行走機構,將永磁鐵(tiě)鑲(xiāng)嵌在履帶上,然而履帶行走機構本身的轉(zhuǎn)向難(nán)題加上複雜罐壁條件,使得該種方式應(yīng)用十(shí)分困難(nán),需要比較大的驅動力,存在(zài)吸附機構與移動機構強耦(ǒu)合、吸(xī)附力(lì)難以調節等問(wèn)題。
對於此,德高(gāo)潔自主研發並投入使用了一款輪式磁吸(xī)附爬壁機器人,機器人附壁(bì)行走能力強(qiáng),牢牢(láo)吸附在船體表麵進行作業,並具備一定(dìng)的曲麵越障(zhàng)能力,可(kě)應(yīng)對儲罐表麵焊縫,凹凸不平情況;采用四驅越野底盤輪式驅動,保障機器人運行的穩定性;可承受200kg負載(zǎi),能夠在280MPa的水壓衝擊力下進行防腐除鏽施工。
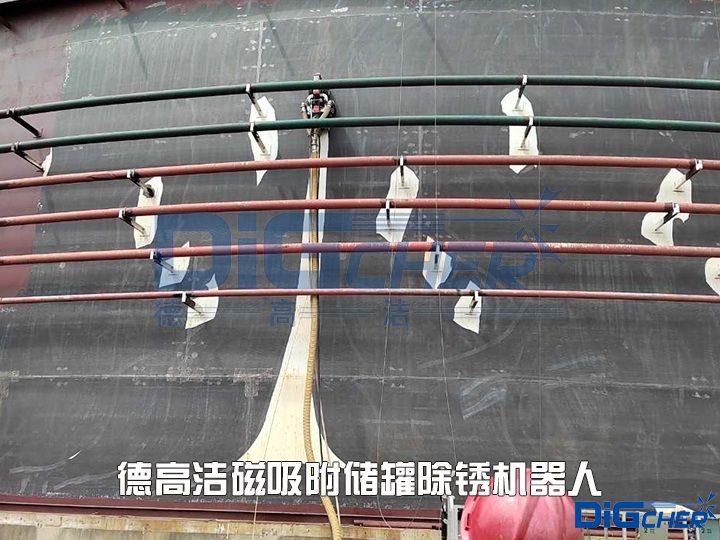
德高潔磁吸附儲罐除鏽機器人,搭載(zǎi)除鏽清洗器作業,行走機構、附壁機構、射流裝置、真空(kōng)係統(tǒng)以及智能化控製係統設計於一體,利用超高壓水射(shè)流除鏽(xiù),能夠高(gāo)效率高質量的完成(chéng)作業,除漆效率可達到70 m²/h,除鏽等級可達Sa2.5,利用真空抽排回收裝置,將除鏽清洗後的廢水及殘渣進行回收,可在極端天氣下對儲罐外壁進行清潔工作,適用於大型儲罐除鏽維護(hù)工作(zuò)。
德高潔自2015年便聚焦智能化、數控化、機器人化工業(yè)清洗技術的(de)研究(jiū),期間自主研發(fā)並投入市場一係列機器人:高壓水除鏽爬壁(bì)機器人、海生物清理爬壁機器人、管道焊縫打(dǎ)磨機器人、自動(dòng)噴塗爬(pá)壁機(jī)器人(rén)、噴砂爬壁機器人等,對大型金屬表麵進行自動化噴砂、除鏽、清洗(xǐ)、噴塗(tú)等,在石化、船舶、電力等行(háng)業得(dé)到了廣泛(fàn)的應用。德高潔可為(wéi)用戶提供自動化機器人設備+專業施工團隊,提供儲罐外壁自動化除鏽、清洗、噴(pēn)塗施工服務,如您有需(xū)求(qiú)歡迎電話聯(lián)係(xì),德高(gāo)潔將竭誠為您服務。
當前(qián)在儲(chǔ)罐防腐除鏽施工中,行業內逐漸采用爬(pá)壁機器人代替人工高(gāo)空作業,提高維護人員在危險環境下作業的安全性,降低作業風險,提高工作效率,並帶來顯著的經濟效益和社會效(xiào)益,儲罐除鏽防腐施工逐(zhú)漸進(jìn)入智能化、機械(xiè)化時代,儲罐除鏽爬壁(bì)機器(qì)人逐漸被行業內關注,但這並不意味著打破“次元壁”就(jiù)如此簡單。
由(yóu)於儲罐屬於(yú)大型靜置設備,儲罐表(biǎo)麵工作環(huán)境複雜,爬壁機器人需要搭載除鏽清(qīng)洗裝置,在儲罐表麵進行除鏽作業,應對與儲罐尺寸、形狀、表麵條件等問題,機器人需要兼具移動、行走、負載,越障(zhàng)等問題,因此(cǐ),爬壁機器人(rén)能否安全穩(wěn)定的完成高空作業,其吸附能力、行走能力是關鍵技術(shù)。
現有的(de)爬(pá)壁機器人由於吸附與行走耦合問題,存在機器人在罐體(tǐ)表麵向下滑動(dòng),穩定性低,不能承載足夠的載荷能力等弊端(duān)。因此,爬壁機器人若想實現人工向(xiàng)自動化機械施工轉變,必須打破爬壁機器人附壁行走(zǒu)的技術壁壘。
爬壁(bì)機器人的主要吸附方式包括:負壓吸附、真(zhēn)空吸附、磁吸附、氣體(tǐ)推力吸附、粘性吸附和仿生學吸附等,磁力吸附式適用於導磁性材料構成的壁麵,在保證吸附距離的前提下,能產(chǎn)生遠超(chāo)其它吸附方式的吸附力,且受到壁麵缺陷的影響較低,被廣泛應用在儲罐除鏽防腐(fǔ)領域。
磁吸附式爬壁機(jī)器人依磁力來源可分為電磁式和永磁式兩種:電磁式爬壁機器人吸力可調節(jiē),但是突然斷電或電力不足將(jiāng)造成(chéng)磁吸附力減小,進而可能引發機器人墜落事故;永磁式爬壁機器(qì)人的吸附力不受斷電影響,但吸附力大小受吸附距離影響且距(jù)離不易主動調節。目前,麵向大型儲罐的除鏽爬壁機器人,吸附方(fāng)式主要采用永磁吸附技術(shù)。
可采用永磁吸附+履帶式行走機構,將永磁鐵(tiě)鑲(xiāng)嵌在履帶上,然而履帶行走機構本身的轉(zhuǎn)向難(nán)題加上複雜罐壁條件,使得該種方式應(yīng)用十(shí)分困難(nán),需要比較大的驅動力,存在(zài)吸附機構與移動機構強耦(ǒu)合、吸(xī)附力(lì)難以調節等問(wèn)題。
對於此,德高(gāo)潔自主研發並投入使用了一款輪式磁吸(xī)附爬壁機器人,機器人附壁(bì)行走能力強(qiáng),牢牢(láo)吸附在船體表麵進行作業,並具備一定(dìng)的曲麵越障(zhàng)能力,可(kě)應(yīng)對儲罐表麵焊縫,凹凸不平情況;采用四驅越野底盤輪式驅動,保障機器人運行的穩定性;可承受200kg負載(zǎi),能夠在280MPa的水壓衝擊力下進行防腐除鏽施工。
德高潔磁吸附儲罐除鏽機器人,搭載(zǎi)除鏽清洗器作業,行走機構、附壁機構、射流裝置、真空(kōng)係統(tǒng)以及智能化控製係統設計於一體,利用超高壓水射(shè)流除鏽(xiù),能夠高(gāo)效率高質量的完成(chéng)作業,除漆效率可達到70 m²/h,除鏽等級可達Sa2.5,利用真空抽排回收裝置,將除鏽清洗後的廢水及殘渣進行回收,可在極端天氣下對儲罐外壁進行清潔工作,適用於大型儲罐除鏽維護(hù)工作(zuò)。
德高潔自2015年便聚焦智能化、數控化、機器人化工業(yè)清洗技術的(de)研究(jiū),期間自主研發(fā)並投入市場一係列機器人:高壓水除鏽爬壁(bì)機器人、海生物清理爬壁機器人、管道焊縫打(dǎ)磨機器人、自動(dòng)噴塗爬(pá)壁機(jī)器人(rén)、噴砂爬壁機器人等,對大型金屬表麵進行自動化噴砂、除鏽、清洗(xǐ)、噴塗(tú)等,在石化、船舶、電力等行(háng)業得(dé)到了廣泛(fàn)的應用。德高潔可為(wéi)用戶提供自動化機器人設備+專業施工團隊,提供儲罐外壁自動化除鏽、清洗、噴(pēn)塗施工服務,如您有需(xū)求(qiú)歡迎電話聯(lián)係(xì),德高(gāo)潔將竭誠為您服務。
熱門搜索:
